드론 매핑(Mapping)이란? – 핵심 4단계로 본 매핑
드론이 4차산업의 대표 분야 중 하나라는 사실은 이미 널리 알려져 있습니다. 드론 배송이나 재난 지역 탐색 등 드론 활용은 이제 우리 생활에 직접 쓰이는 형태로 다가왔죠. 그중에서도 드론을 활용한 매핑(Mapping) 기술은 건설 현장과 토지조사 등에서 그 활용 가치가 점점 늘고 있는데요. 오늘은 이 드론 매핑이란 무엇인지 알아보겠습니다.

드론 매핑은 크게 본다면 드론을 활용해 측량을 하는 하나의 프로세스를 의미합니다. 측량이 필요한 지역에 드론을 띄워 항공 사진을 촬영하고, 이를 컴퓨터 프로그램으로 후처리를 해 사용자가 원하는 결과물을 얻는 것이지요. 이 과정을 크게 네 단계로 보면 1.촬영 계획 수립, 2.지상기준점(GCP) 설치 및 관측, 3.비행 및 촬영, 4.영상 후처리 순이 됩니다.
1. 매핑의 꽃 – 영상 후처리
그러면 보다 쉽게 이해할 수 있도록 설명 순서를 거꾸로 해, 마지막 과정인 영상 후처리부터 차근차근 살펴보겠습니다. 현지 촬영이 끝난 후에 취득한 데이터는 후처리 과정을 거치게 되는데요. 기본적으로 사진측량의 원리를 따릅니다. 사진측량이란 촬영 각도를 달리한 2장 이상의 사진을 이용하여 그로부터 좌표 및 형상을 만들어내는 기술입니다.
프로그램에서는 실제로 SFM(Structure From Motion)이란 방법을 사용하는데요. 다양한 시점에서 촬영한 수백에서 수천 장의 평면(2D) 사진으로부터 카메라의 위치를 추정하고, 사진의 특징점들을 잡아 삼각 측량하여 촬영된 물체나 지역을 입체(3D) 구조로 복원하는 방법입니다.
이렇게 복원된 입체(3D) 구조는 처음에는 모두 점(point)으로 이루어져 있는데요. 이때 알아야 하는 개념이 바로 포인트 클라우드(Point Cloud)입니다. 포인트 클라우드는 말 그대로 점이 구름처럼 모여있다는 뜻입니다. 포인트 클라우드에 속해 있는 점 하나하나는 모두 높이를 포함한 위치(X, Y, Z)와 색상 정보를 가지고 있는데, 바로 이런 특징 때문에 우리는 최종 결과물에서 표고나 체적량 등 3차원 정보를 얻을 수 있게 됩니다.

이런 후처리 과정에서 얻게 되는 중요한 결과물 중 하나가 바로 ‘정사영상’입니다. ‘정사영상’이란 ‘수직에서 바라본 왜곡 없는 사진’을 말하는데, 정사사진이라고도 합니다. 흔히 우리가 구글어스 등에서 볼 수 있는 위성사진을 생각하면 이해가 쉽지요.
일반 사진은 중심투영이기 때문에 정가운데를 제외한 가장자리에서는 건물의 측면도 함께 찍힙니다. 렌즈의 특성 때문에 주변부에 일종의 왜곡이 발생하는 것이지요. 이를 후처리 과정에서 기복변위에 대한 편위수정을 하고, 어느 위치에서든 수직으로 보이는 사진을 얻습니다.
이 정사영상도 입체 구조와 마찬가지로 포인트 클라우드로 구성돼 있지만, 수직 위치에서 바라본 상태로 결과물을 만들기 때문에 마치 평면 사진처럼 보입니다. 정사영상은 건설 분야의 설계나 공사 진행 현황 파악 등에 활용할 수 있으며, 지도 제작을 하거나 지적도 등을 중첩해 지적 재조사, 토지 보상 등 토지 관련 실무에 사용하기도 합니다. 이렇게 도면을 중첩하는 작업을 하기 위해서는 정사영상이 반드시 필요합니다.
2. 매핑의 소스 만들기 – 비행 및 촬영
그러면 이런 매핑 결과물을 얻기 위해서는 어떤 식으로 촬영을 해야 할까요? 후처리 과정에서 여러 가지 보정이 이루어지기는 하지만, 결과물의 품질을 보다 높이기 위해서는 기본적으로 정확한 촬영이 필요합니다. 소스포토(source photo)의 품질이 높을수록 그만큼 결과물의 품질도 함께 증가하기 때문이지요.
이 품질을 결정하는 데는 여러 요인이 있습니다. 해상도나 이미지센서 등과 같은 카메라의 성능, 촬영 당시 기상 조건, 태양 위치에 따른 그림자 정도, 촬영 고도 등이 영향을 미치는데요. 여기서는 그중에서도 우선 고려해야 할 ‘중복도’에 대해서 알아보겠습니다.
드론 촬영을 실행하기 전에는 먼저 ‘비행 플랜’을 세우는 작업을 하는데요. 촬영해야 하는 구체적인 지역을 지도 위에 그리고, 기체의 비행 범위를 고려해 한 지점에서 촬영이 가능한 범위로 세션을 나눕니다. 이때 각 세션 촬영에 필요한 고도와 그리드의 각도, 중복도 등을 설정하게 됩니다. 중복도는 낱장의 사진이 서로 중첩되는 정도를 말하는데, 사진측량에서 매우 중요한 요소입니다.
이 중복도는 주로 기체의 속도, 고도, 카메라의 촬영 간격 등에 따라 결정되는데요. 실제 매핑 앱을 사용할 때는 중복도를 설정하면 나머지는 자동으로 설정되기도 합니다.
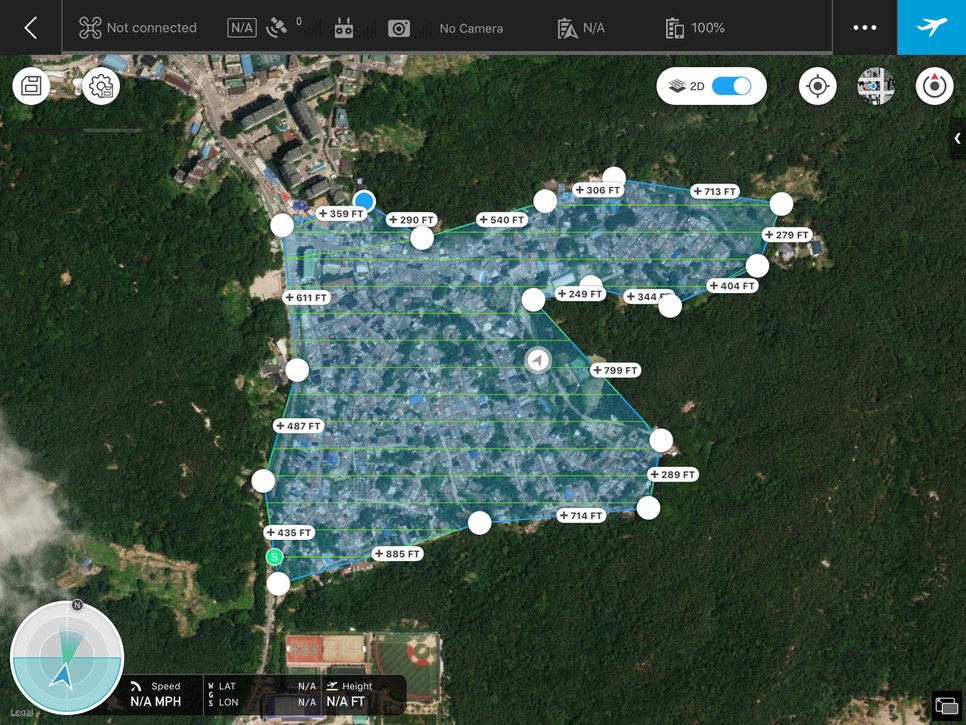
높은 품질을 위해서는 횡중복도와 종중복도를 80% 이상 설정해야 합니다. 가로와 세로의 중복도가 80% 이상이라는 것은 어느 한 지점이 최소 4장 이상의 사진에 찍혀야 한다는 뜻이지요. 사진 간의 중복도가 부족하면 영상 정합에 오류가 발생하여 왜곡이 일어나기 때문에 높은 중복도는 촬영에 있어 필수적입니다.
이런 중복도 설정은 촬영 현장 환경에 따라 달라집니다. 임야나 대지 위주의 지역인지 고층 건물이 많은 도심 지역인지에 따라서 필요한 중복도 및 비행 경로(그리드)가 바뀌어야 하므로 비행 플랜 작성 시에는 현장 상황에 맞는 적합한 계획을 세워야 합니다.
3. 매핑의 정확도를 올려라 – 지상기준점(GCP) 설치 및 관측
정확한 매핑 결과물을 위해 반드시 고려해야 할 또 다른 요소에는 ‘지상기준점(GCP)’이 있습니다. 지상기준점(GCP)이란 정합영상의 기하보정을 위해 지상에 대공표지를 설치하고 관측한 점을 말합니다. 경우에 따라서는 대공표지 대신 명도차가 확실한 아스팔트 위 차선이나 인도 표지, 맨홀 등을 이용하기도 합니다. 지상기준점을 지정한 후에는 별도의 GPS 장비를 사용해 해당 점의 정밀한 3차원 위치 값을 얻습니다.
이 지상기준점은 결과물의 정합 정도와 위치를 보정하는 중요한 역할을 하기 때문에 설치에 많은 주의가 필요한데요. 1km x 1km 기준으로 총 9점 이상을 설치해야 하고, 최대한 고르게 배치해야 합니다. 또 1개의 점은 최소 3장의 낱장 사진에 촬영되어야 합니다.
만약 이 지상기준점 배치가 적절하지 못하면 영상정합의 정밀성이 낮아져 누락된 지역에 편차가 발생해 결과적으로 매핑 결과물의 품질을 떨어뜨리게 됩니다. 따라서 결과물의 품질을 높이기 위해서는 드론 촬영 전에 적절한 지상기준점을 설치하고 점에 대한 정확한 값을 확보하는 것이 매우 중요합니다.
4. 매핑의 시작 – 촬영/비행 허가와 비행 플랜
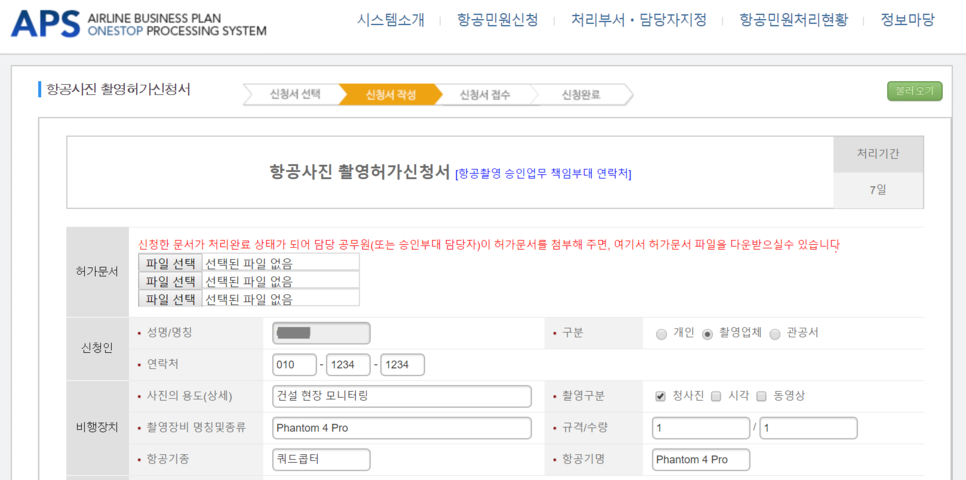
자 이제 드디어 맵핑의 첫 단계입니다. 이 단계에서는 전체적인 촬영 계획을 수립하고, 현장 작업을 시작하기 전에 필요한 사전 준비 작업을 진행합니다. 이때 실제로 드론을 운용할 수 있도록 행정 절차를 밟게 되는데, 행정 절차는 크게 비행 승인 신청(비행 금지, 제한 구역에서 비행 시)과 항공 촬영 허가 신청으로 이루어집니다.
비행 승인과 촬영 허가는 담당하는 기관이 서로 다르기 때문에 양쪽 모두에 신청해야 한다는 점을 유의해야 합니다. 비행 승인 관할 기관은 지역에 따라 지방항공청이나 김포항공관리사무소, 군부대 등 다양하고 촬영 허가 기관은 모두 해당 지역 군부대입니다.
예를 들어 서울 도심에서 촬영을 한다면 비행 승인과 촬영 허가는 모두 수방사에서 담당하고, 고양시라면 비행 승인은 김포항공관리사무소가 촬영 허가는 해당 지역 군부대가 맡습니다.
이런 비행 승인, 촬영 허가는 모두 원스탑(www.onestop.go.kr)에 접속해 진행할 수 있습니다. 신청 시에 해당 지역의 주소를 입력하면 자동으로 관할 기관이 지정되니 담당 기관을 찾는 일이 복잡할까봐 너무 걱정할 필요는 없습니다.
비행 승인과 촬영 허가를 마쳤으면, 앞서 한번 언급하기도 했던 ‘비행 플랜’을 짜게 됩니다. 촬영 구역 설정, 비행 고도, 비행 경로, 중복도 등을 정하고 자동 비행을 수행할 수 있는 애플리케이션에 적용합니다. 이렇게 설정한 값으로 현장에서 드론이 비행 임무를 수행하게 되지요.
이 비행 플랜 수립 단계에서 중요하게 고려해야 하는 사항이 바로 최종 결과물의 ‘정밀도’입니다. 즉 어느 정도의 해상도로 최종 결과물을 만들어낼지를 미리 정한다는 것인데, 이때 사용하는 개념이 공간해상도 중의 하나인 GSD(Ground Sample Distance)입니다.
GSD란 사진 영상에서 각 픽셀(pixel)이 나타내는 X, Y 지상 거리를 말하는데요. 예를 들어 5cm급 영상이라고 하면 1픽셀이 5cm 크기의 물체를 표현한다는 의미입니다. 보통 위성 촬영으로는 50cm급 영상을 얻을 수 있지만, 드론 촬영으로는 그보다 훨씬 정밀한 3~5cm급 영상을 얻을 수 있습니다. 비행 플랜을 세울 때는 이렇게 요구되는 결과물의 정밀도에 따라 비행 고도 등의 설정을 달리해야 합니다.
오늘은 드론 매핑이 어떻게 이루어지는지 전체적인 과정을 살펴보았는데요. 드론 매핑을 이해하는 데 조금이나마 도움이 되었길 바랍니다. 다음 포스트에서는 이런 드론 매핑이 건설 현장에서는 어떻게 활용되고 있으며 어떤 가치를 갖는지 살펴보도록 하겠습니다.
엔젤스윙 솔루션에 대해 궁금하다면?